
Im Auslieferungszustand meines RoboterKing 210 FPV Racer ist auf dem Mini Naze32 Flightcontroller die Cleanflight-Firmware 1.9.0 (Stand 31. Mai 2015) vorinstalliert. Da gibt es schon neuere Versionen, daher habe die momentan aktuelle stabile Version 1.12.1 von Cleanflight geflashed.
Nach dem Reboot des Naze32 habe ich mich an die Konfiguration gemacht. Grundsätzlich nutze ich zunächst immer die Standard-PID Einstellungen. Je nach Bedarf passe ich diese dann noch an das Setup eines FPV Racers an.
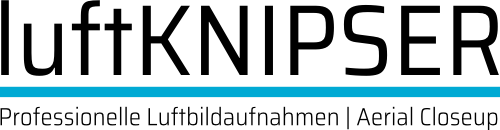
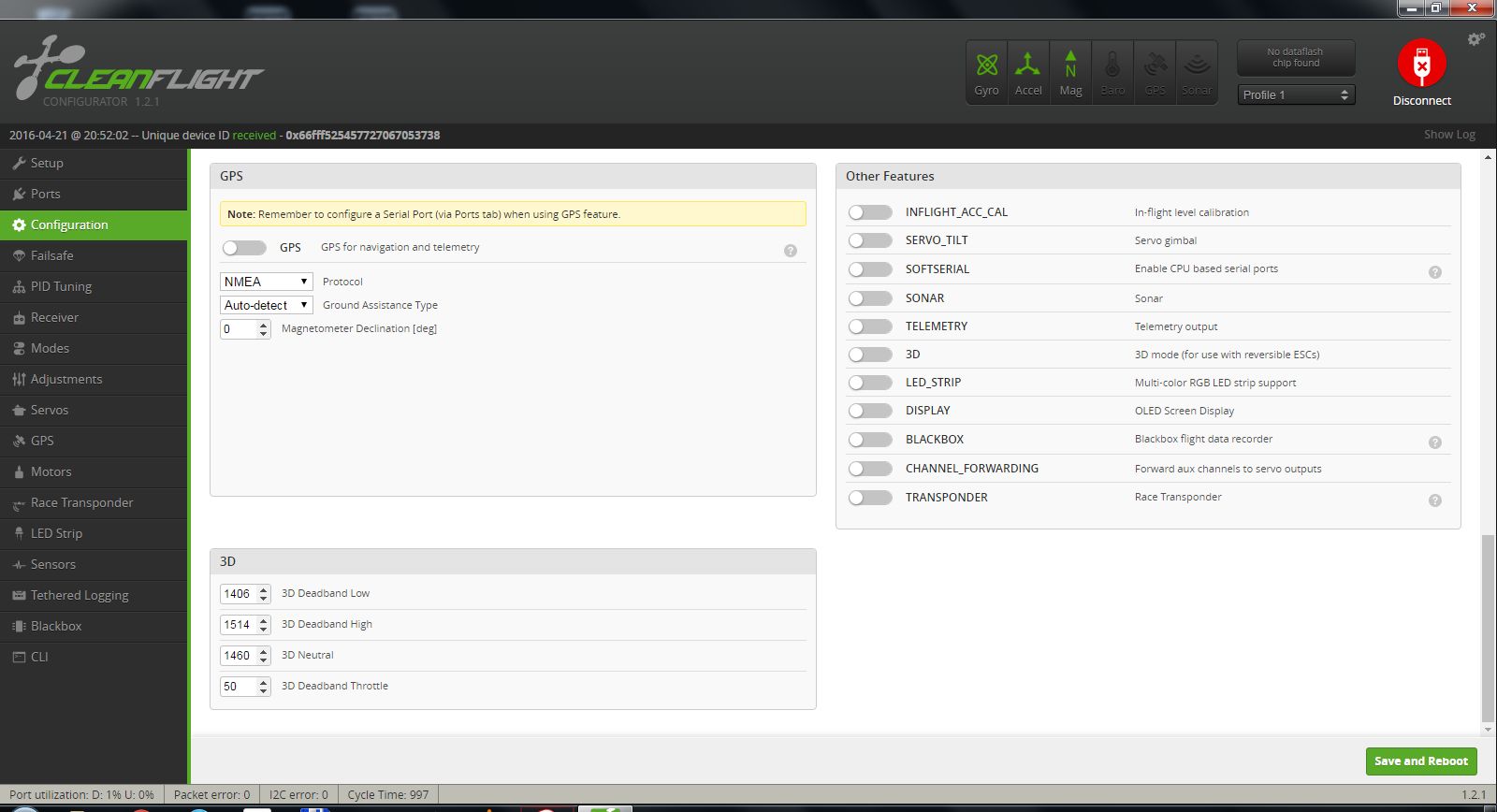
Cleanflight Configuration
Da der RoboterKing 210 FPV Racer ESCs mit OneShot 125 Unterstützung verbaut hat, habe ich diese Option auf der Cleanflight Configuration-Seite auch aktiviert. Ebenso MOTOR STOP und DISARM MOTORS. Letztes hat allerdings keine Funktion mehr, sobald man den Airmode aktiviert, dies nur als Hinweis.
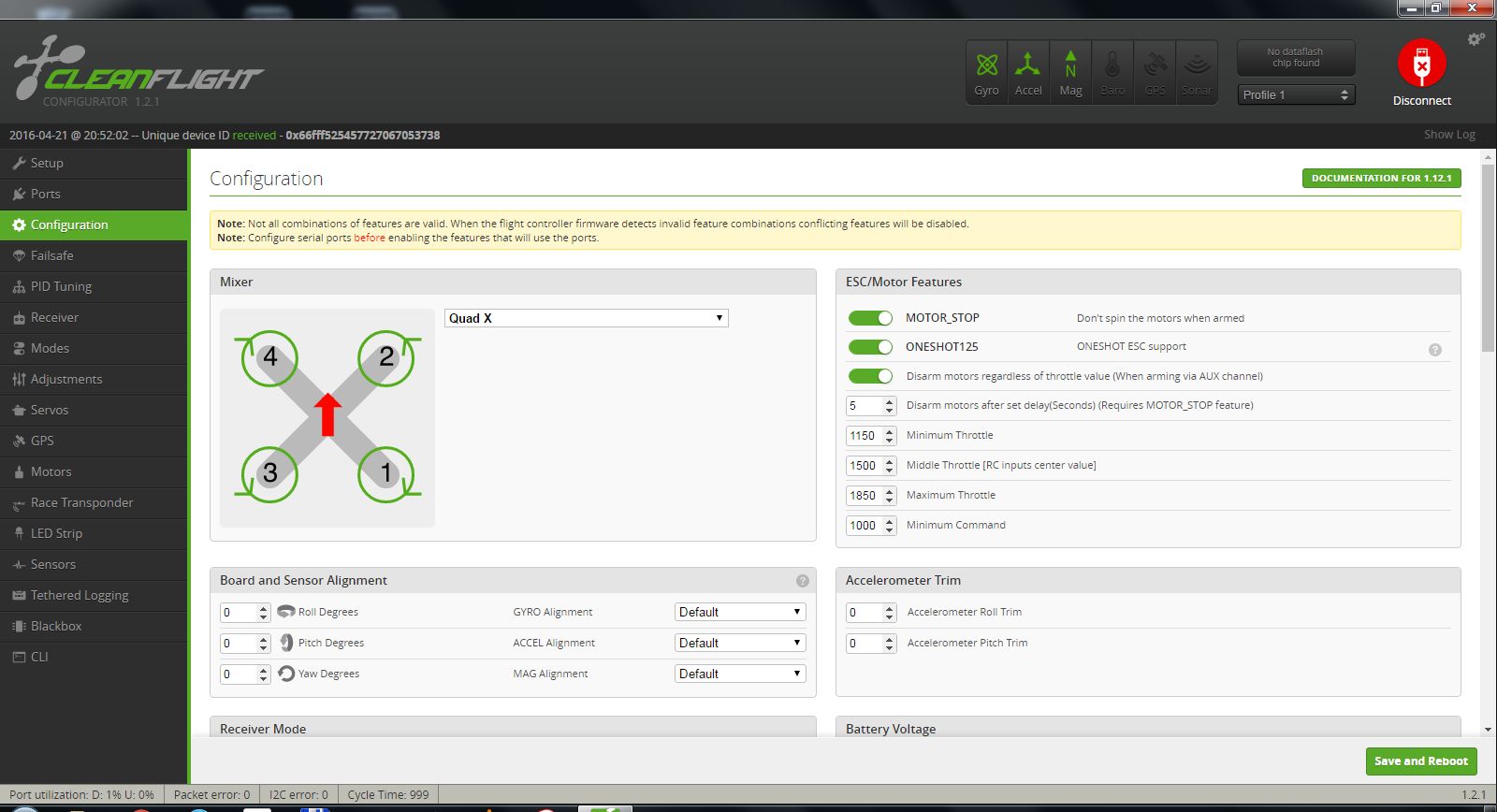
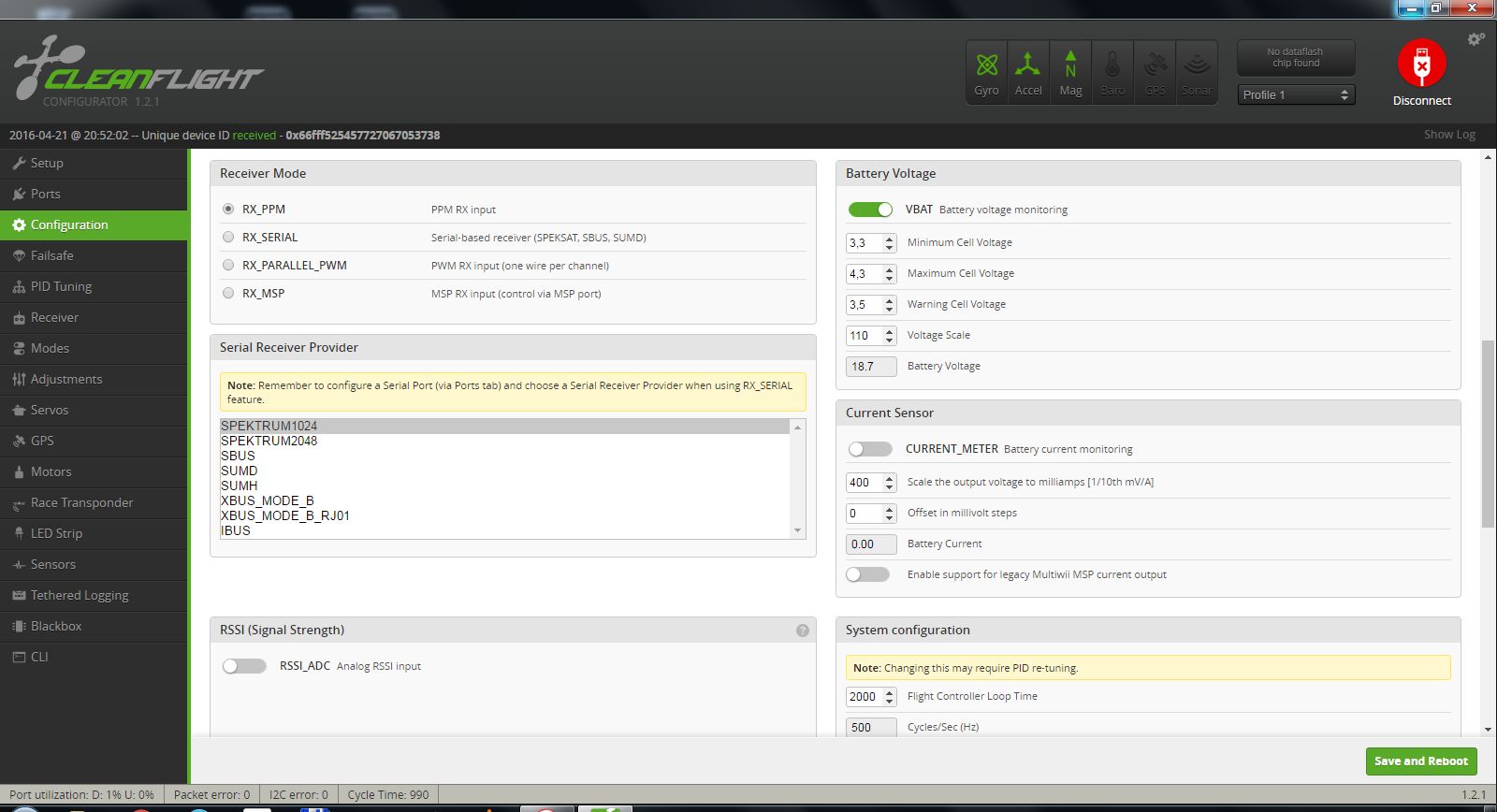
Bei meinem verbauten Empfänger handelt es sich um den FrSky XSR, welcher per CPPM mit dem Naze32 kommuniziert. Der Receiver Mode muss daher auf RX_PPM gestellt werden. Als Serial Receiver Provider ist in diesem Setup dann „SPEKTRUM1024“ auszuwählen. Weitere Modifikationen an den Einstellungen habe ich nicht auf dieser Seite vorgenommen.
Cleanflight PID Tuning
Als Vorgabe PID Controller ist MultiWii (Rewrite) eingestellt. Das hab ich auch so belassen. Ebenfalls die Proportional, Integral und Derivative Werte (PID) sind unverändert. Ich probiere diese immer erst mal aus. Wenn der Kopter beim Fliegen wobbelt oder gar ganz unfliegbar ist, nehme ich Modifikationen vor. In der Regel klappt es mit den Standard Einstellungen nämlich meist sehr gut.

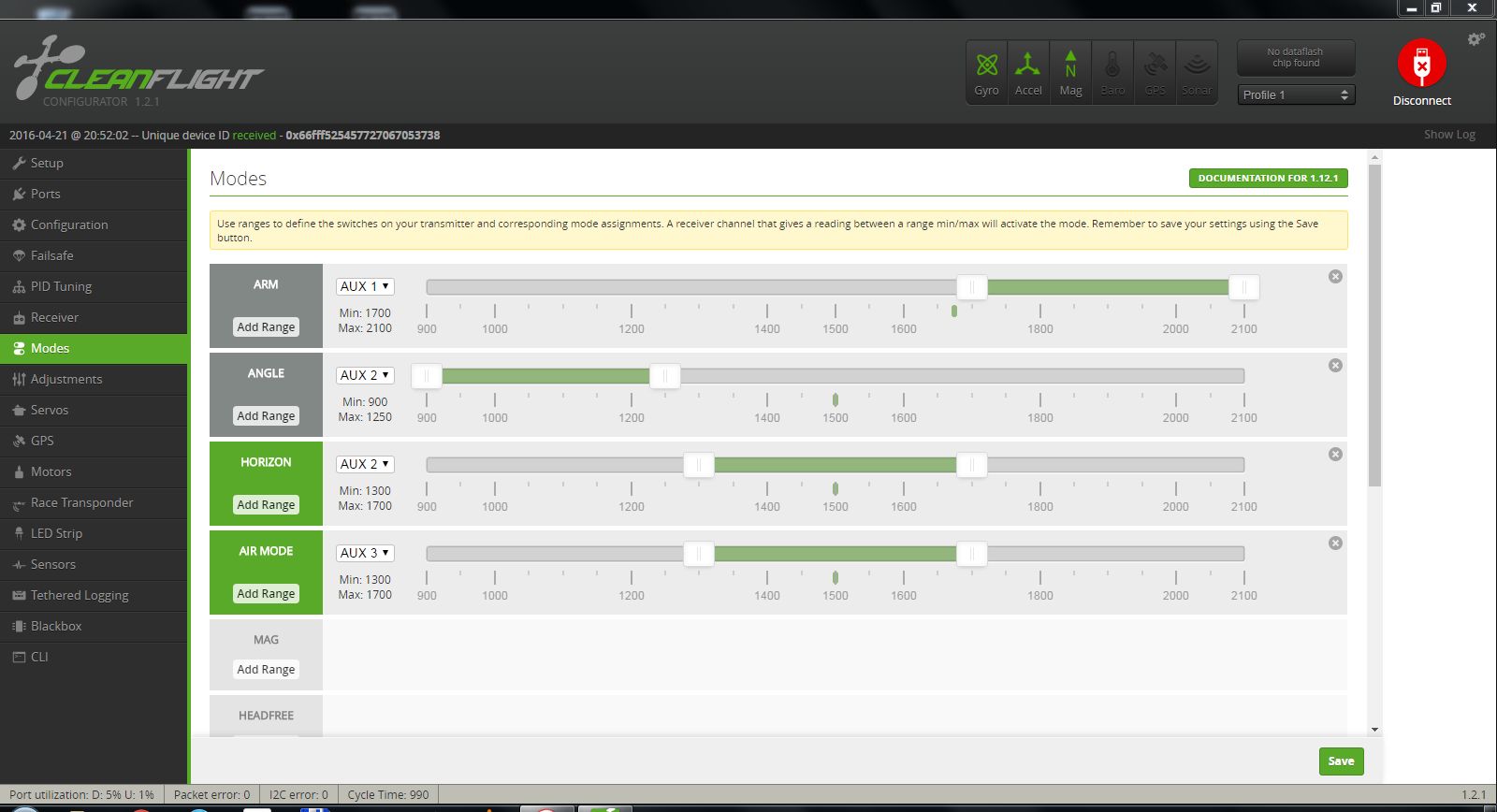
Cleanflight Modes
Für meine Racer verwende ich immer die gleichen Modes Einstellungen, dann muss man sich nicht bei einem Modellwechsel umstellen. Ein Switch am Sender nutze ich um dem Racer „scharf“ zu schalten. Das ist der Mode ARM (auf AUX 1). Mit einem zweiten Schalter (AUX 2) wähle ich den Flugmode. Ich kann so je nach Bedarf zwischen ANGLE, HORIZON und ACRO umschalten. Auf einem dritten Schalter (AUX 3)habe ich den AIRMODE gelegt.
RoboterKing 210 – Erstflug auf Sicht
Bevor es zum „Maiden“, den Jungfernflug geht, müssen noch die ESC angelernt bzw. kalibriert werden. Dies ist erforderlich, damit der Flightcontroller diese korrekt ansteuern kann. Ich war danach sehr gespannt, wie sich der RoboterKing 210 FPV fliegen lässt.
Auf freiem Feld ging es in Lüfte. Vom Erstflug habe ich eine FPV-Aufnahme gemacht. Ich muss sagen, der RoboterKing liegt sauber in der Luft. Kein Wobbeln und ordentlich Dampf an 4S. Die Rates werde ich noch etwas erhöhen, damit der Racer noch agiler ist. Ansonsten passt es schon prima.
4 Antworten zu “RoboterKing 210 FPV Racer – Einstellungen und Erstflug”
[…] RoboterKing 210 FPV Racer – Einstellungen und Erstflug […]
[…] nächsten Teil der Serie werde ich an die Cleanflight Einstellungen zum RoboterKing 210 FPV gehen und den ersten Testflug […]
[…] Link: https://www.luftknipser.de/video/roboterking-210-fpv-racer-einstellungen-erstflug/ […]
Hallo,
habe nun meinen 210er Roboterking bekommen.
Mit Spektrum Empfänger AR610 verbunden.
Alles lies sich gut einstellen. Auch die Esc´s anlernen usw.
An den PID´s nichts verändert , also so wie es bei dir auf dem Bild ist.
Nun schaukelt er sich auf wenn ich Gas gebe.
Schweben auf Gasmittelstellung geht ab und zu ohne zu ruckeln aber auch nicht immer.
Kannst Du mir helfen?
Viele Grüße aus dem sonnigen Schwarzwald
Dejan