
Nach dem Unboxing des RoboterKing 210 FPV Racer war ich auf das Innenleben des Kopters gespannt. Die beiliegende Bedinungsanleitung sagt nichts über die verbauten Komponenten wie den Flightcontroller, ESCs oder den FPV-Videotransmitter aus. Neben einer Liste der Frame-Bauteile ist noch ein Anschlußdiagramm für einen PWM Empfänger in der Beschreibung skizziert. Da ich solche Empfänger nicht mehr besitze, muss ich herausfinden welcher Flightcontroller genau eingebaut ist, um die weiteren Anschlussmöglichkeiten eines Empfängers zu klären. Aufrund des kleinen Innenraums des RoboterKing 210, möchte ich einen FrSky XSR Empfänger einbauen. Dieser unterstützt SBUS und CPPM.
VTX, LiPo Beeper und FPV-Kamera
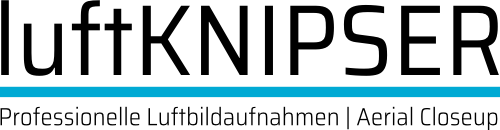
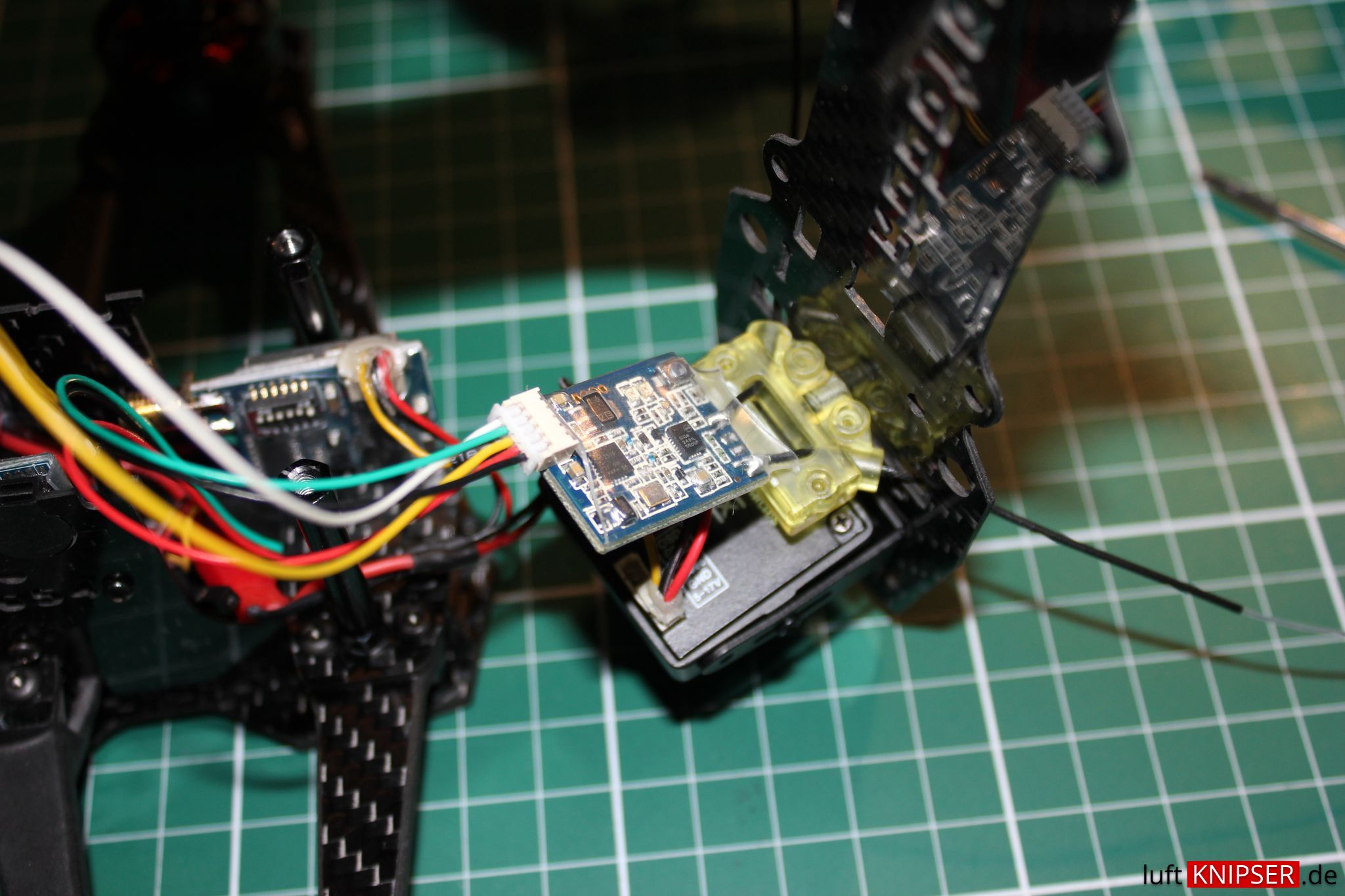
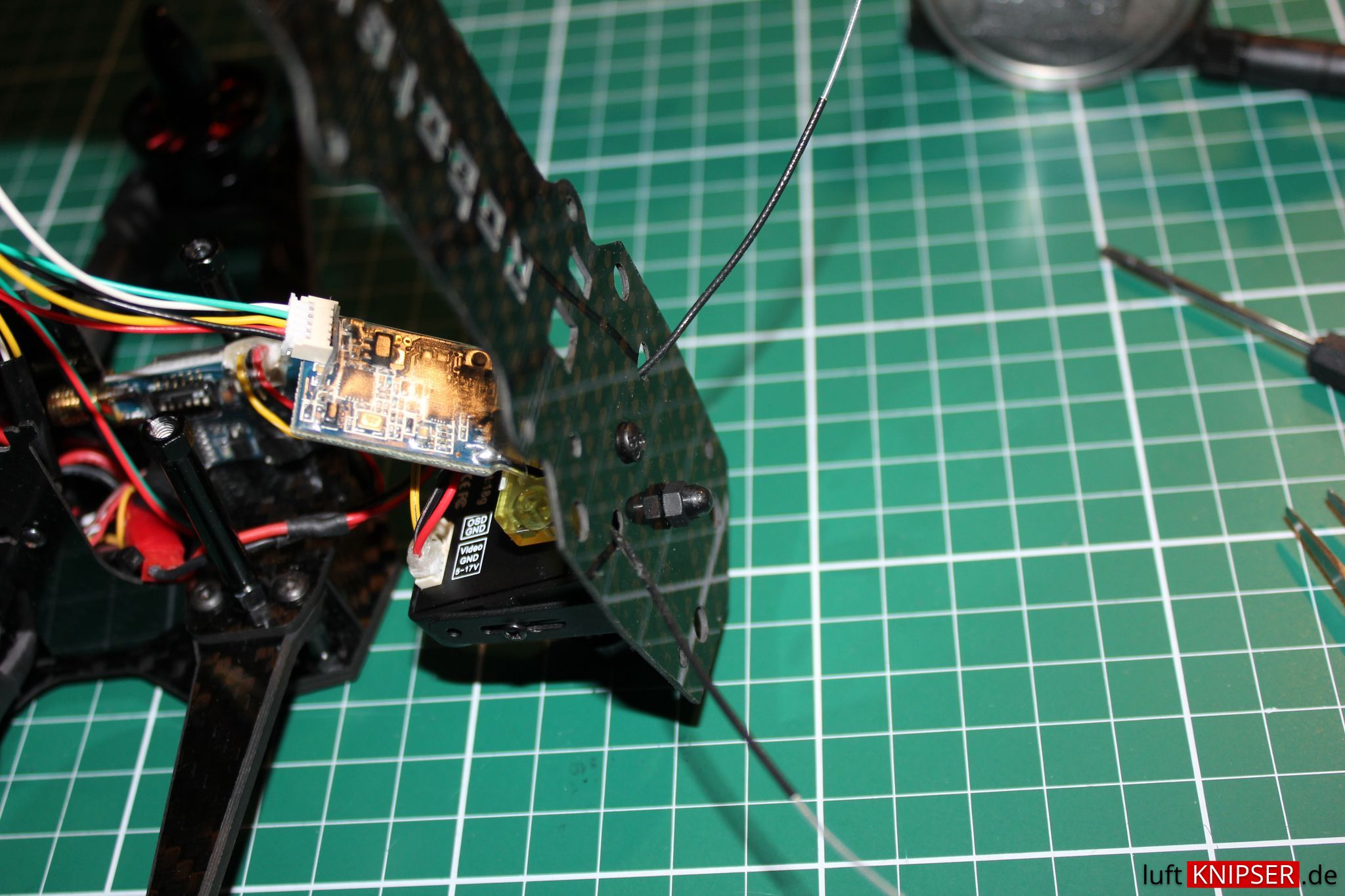
Wenn man die Top-Platte des RoboterKing 210 FPV Racer entfernt, hat man Zugriff auf die FPV-Kamera Runcam SKYPLUS, welche mit einer Schraube an der Top-Platte montiert ist. Hinter der Runcam ist ein Antennenhalter montiert. Von der Oberseite der Top-Platte steckt man da die mitgelieferten Antennenröhrchen durch, um einen 90 Grad Winkel bei den beiden Antennen des Empfängers zu erreichen. Zudem sollen die Antennenröhrchen die Antennen schützen. Wie stabil das bei einem Einschlag ist, wird sich zeigen.
Da ich jetzt direkt an die Runcam dran komme, habe ich spontan mal das OSD Kabel angeschlossen und meinen Namen in das OSD einprogrammiert. Bitte dran denken die FPV Antenne aufzuschrauben bevor ihr Strom auf dem Kopter gebt! Sonst besteht die Gefahr direkt den FPV Videosender zu zerstören.

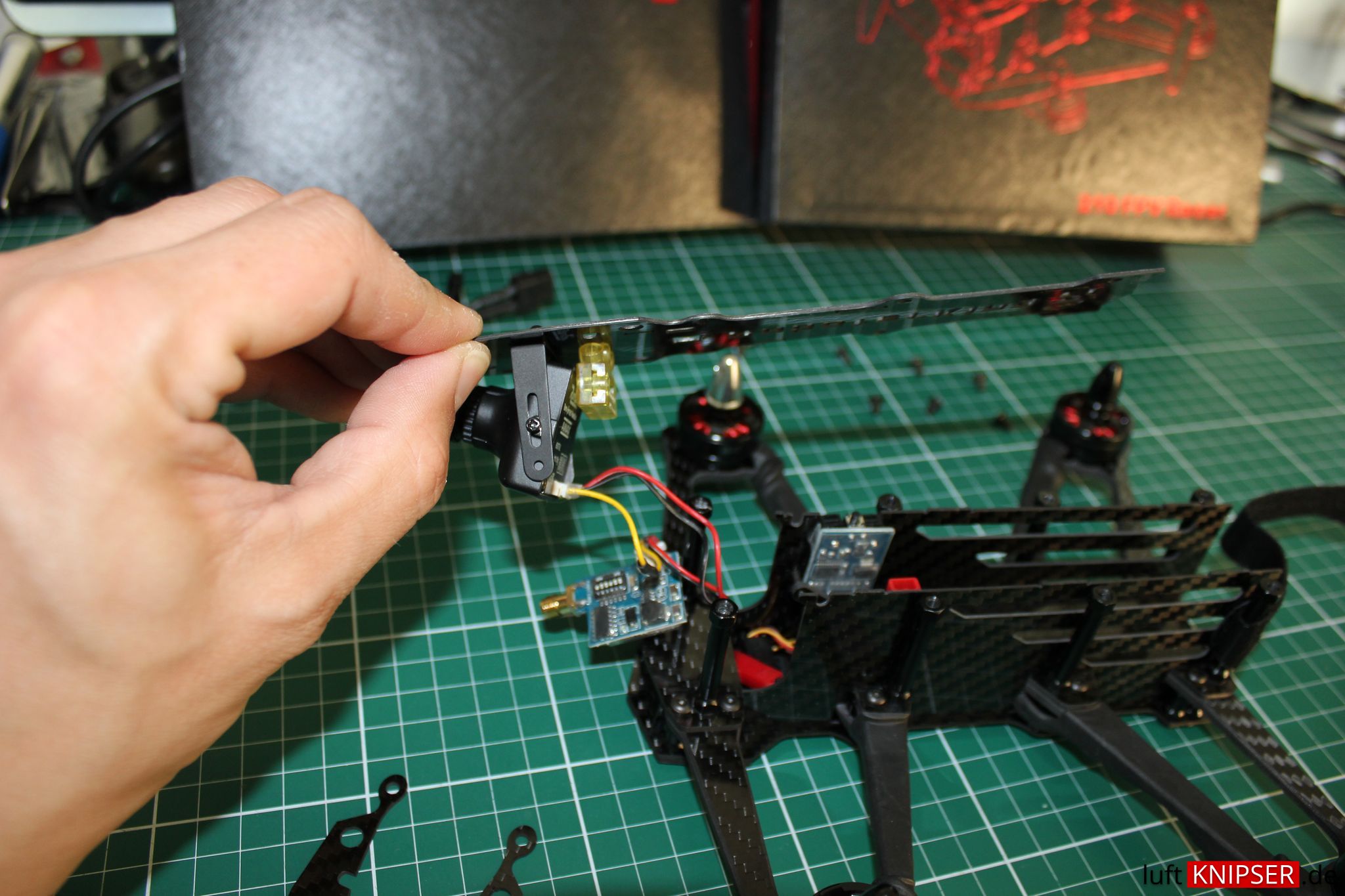
 Als FPV Videotransmitter ist ein TS5813S Sender verbaut. Dieser hat 40 Kanäle (inkl. Raceband) und sendet mit 25mW im 5.8 GHz Band. Der Antennenanschluss ist RP-SMA Female (Pin in der Mitte). Die Kanalumschaltung erfolgt der Dip-Schalter. Da keine Beschreibung dabei ist, welche Schalterposition was bedeutet, muss man sich diese im Internet besorgen, oder hat zufällig den gleichen Sender schon in seinem Bestand.
Als FPV Videotransmitter ist ein TS5813S Sender verbaut. Dieser hat 40 Kanäle (inkl. Raceband) und sendet mit 25mW im 5.8 GHz Band. Der Antennenanschluss ist RP-SMA Female (Pin in der Mitte). Die Kanalumschaltung erfolgt der Dip-Schalter. Da keine Beschreibung dabei ist, welche Schalterposition was bedeutet, muss man sich diese im Internet besorgen, oder hat zufällig den gleichen Sender schon in seinem Bestand.
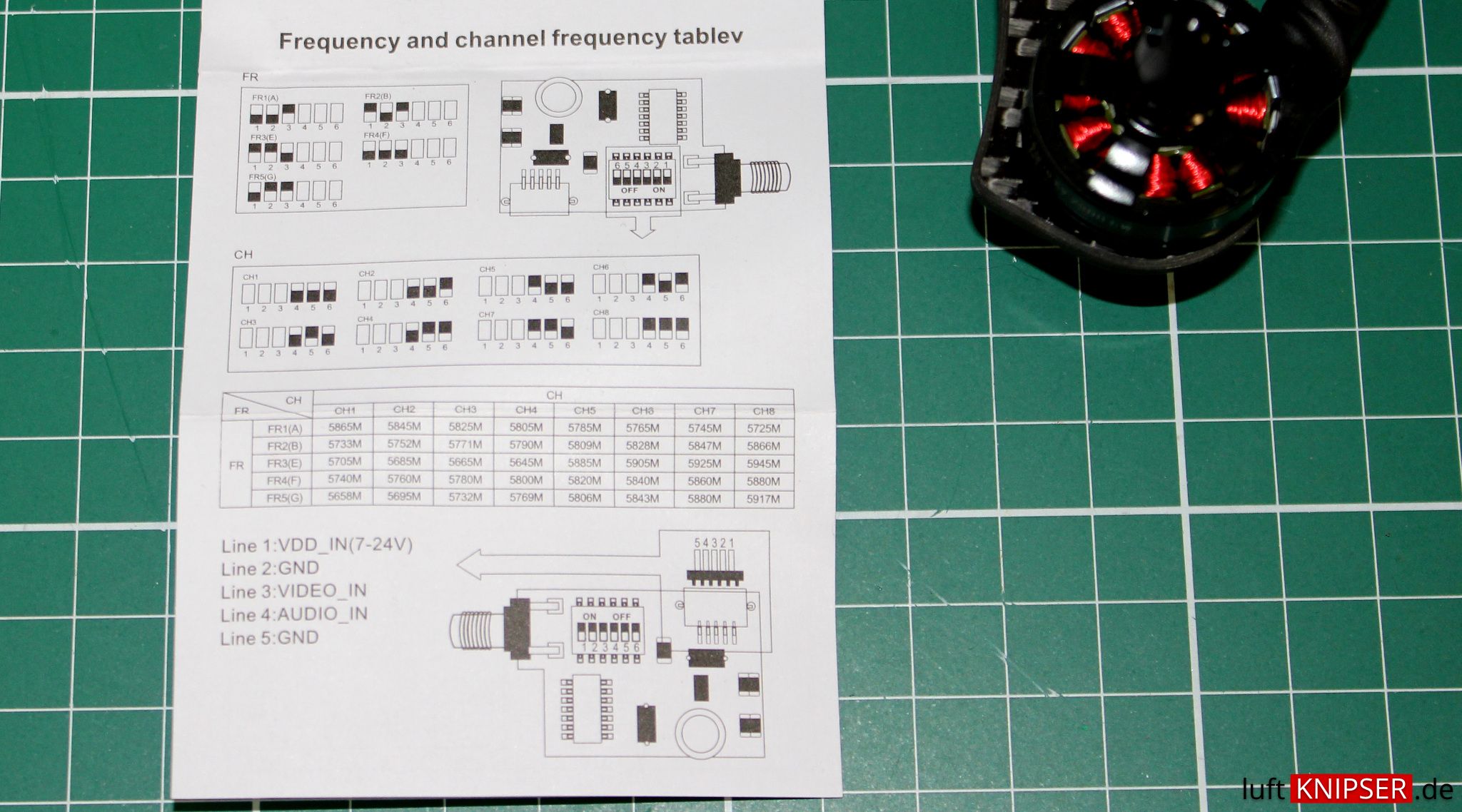
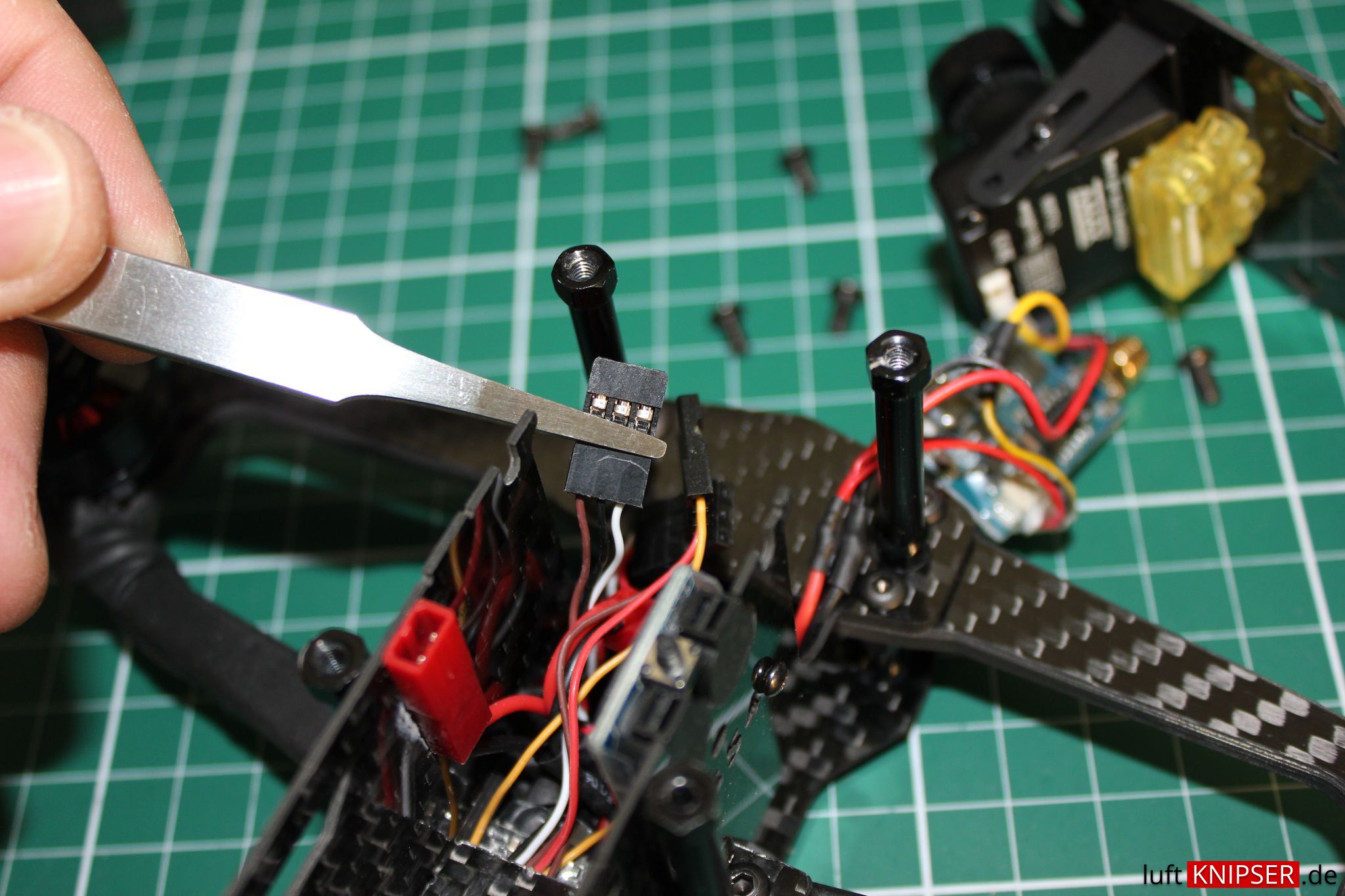
An der rechten Seite des Racers ist ein Lipo-Warner montiert. Zwei Kabel (+ und -) gehen direkt an den Lipo Stecker zur Spannungsmessung. Zusätzlich ist noch ein 3poliger Servostecker mit den Farben weiß / rot / schwarz angeschlossen. Diesen steckt man beim einem PWM Empfänger auf einen freien Kanal. Ich werde damit bei dem FrSky Empfänger nichts mit anfangen können. D.h ich muss ohne Lost Plane Beeper leben.
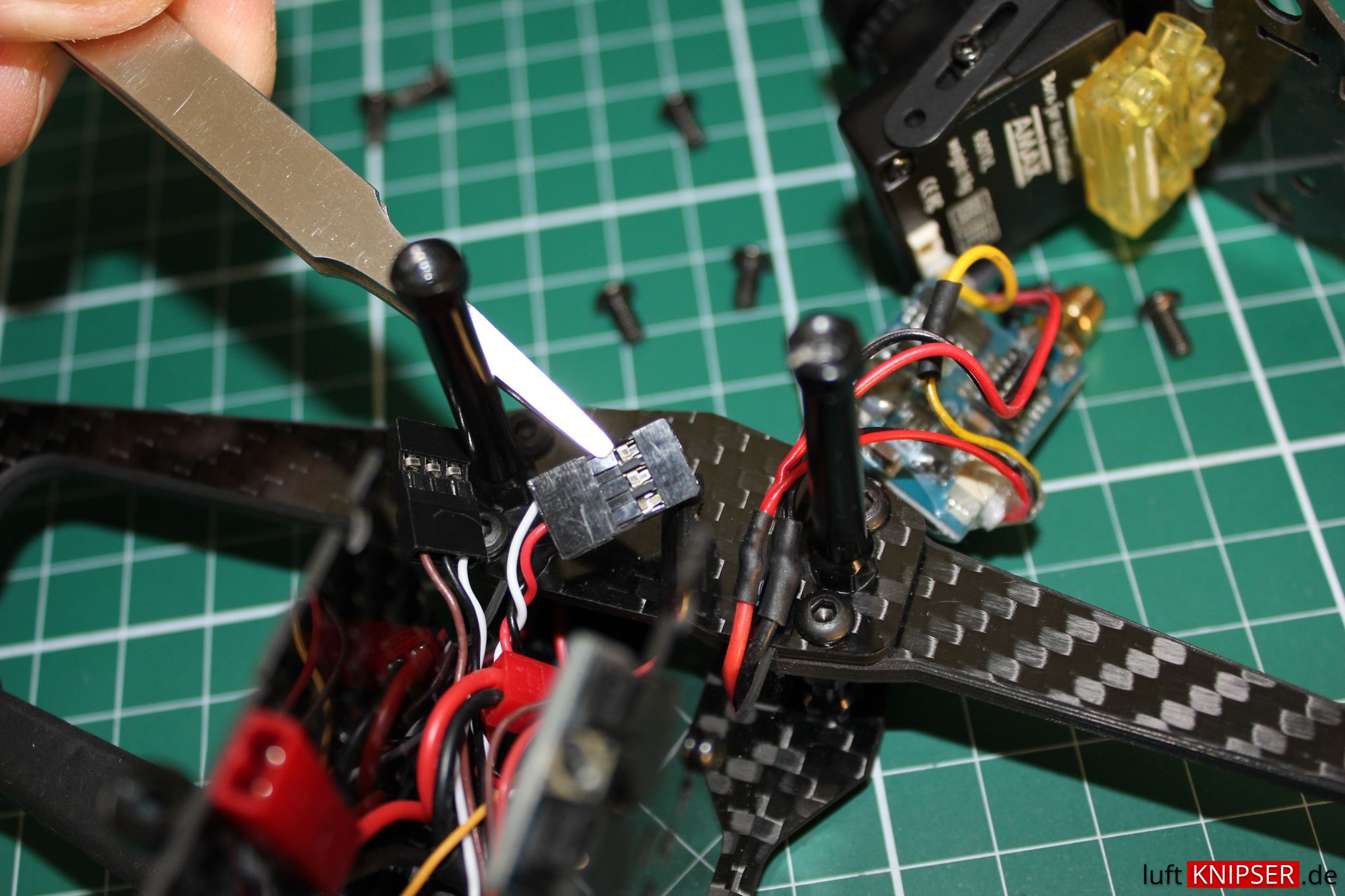
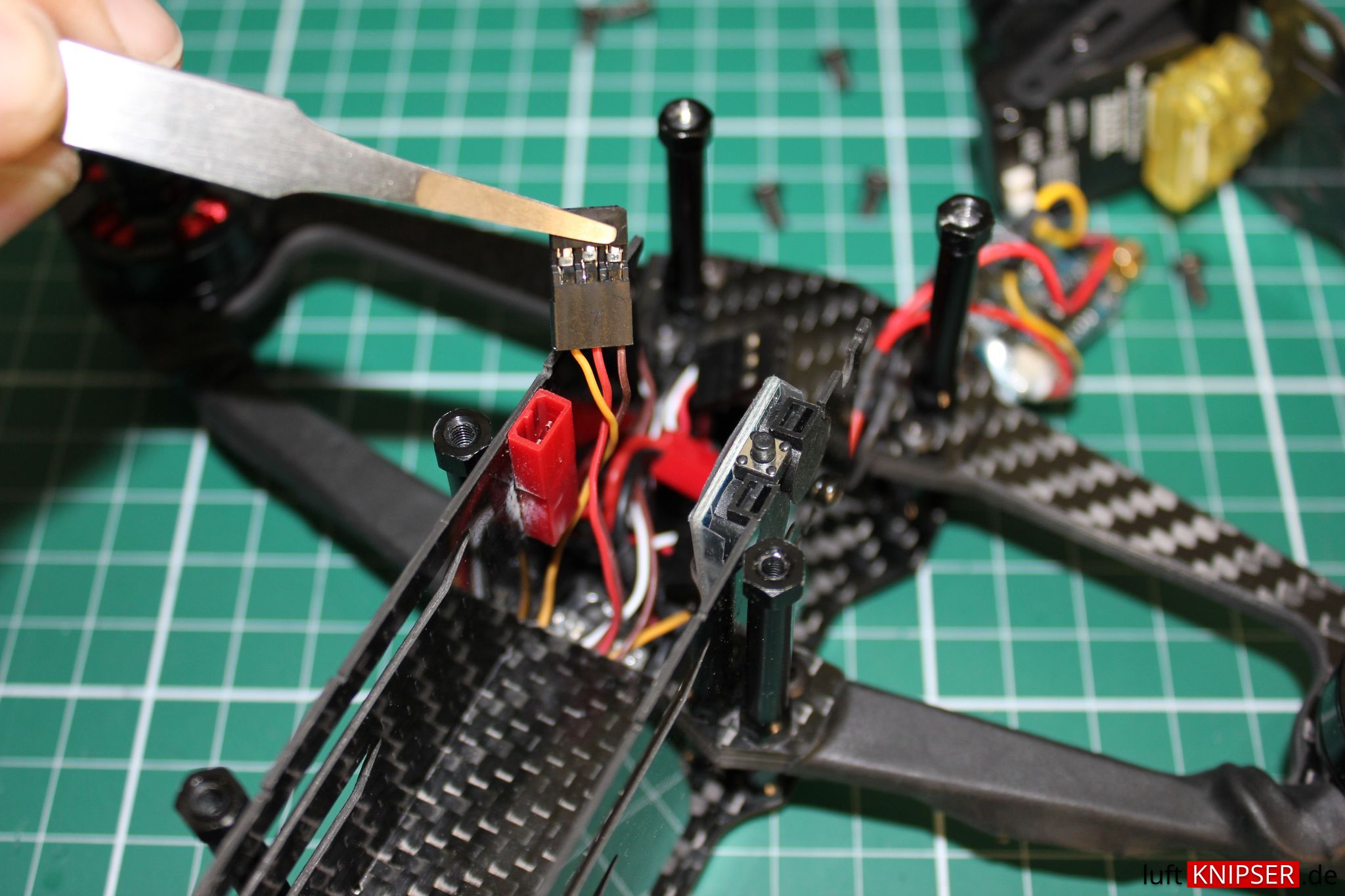
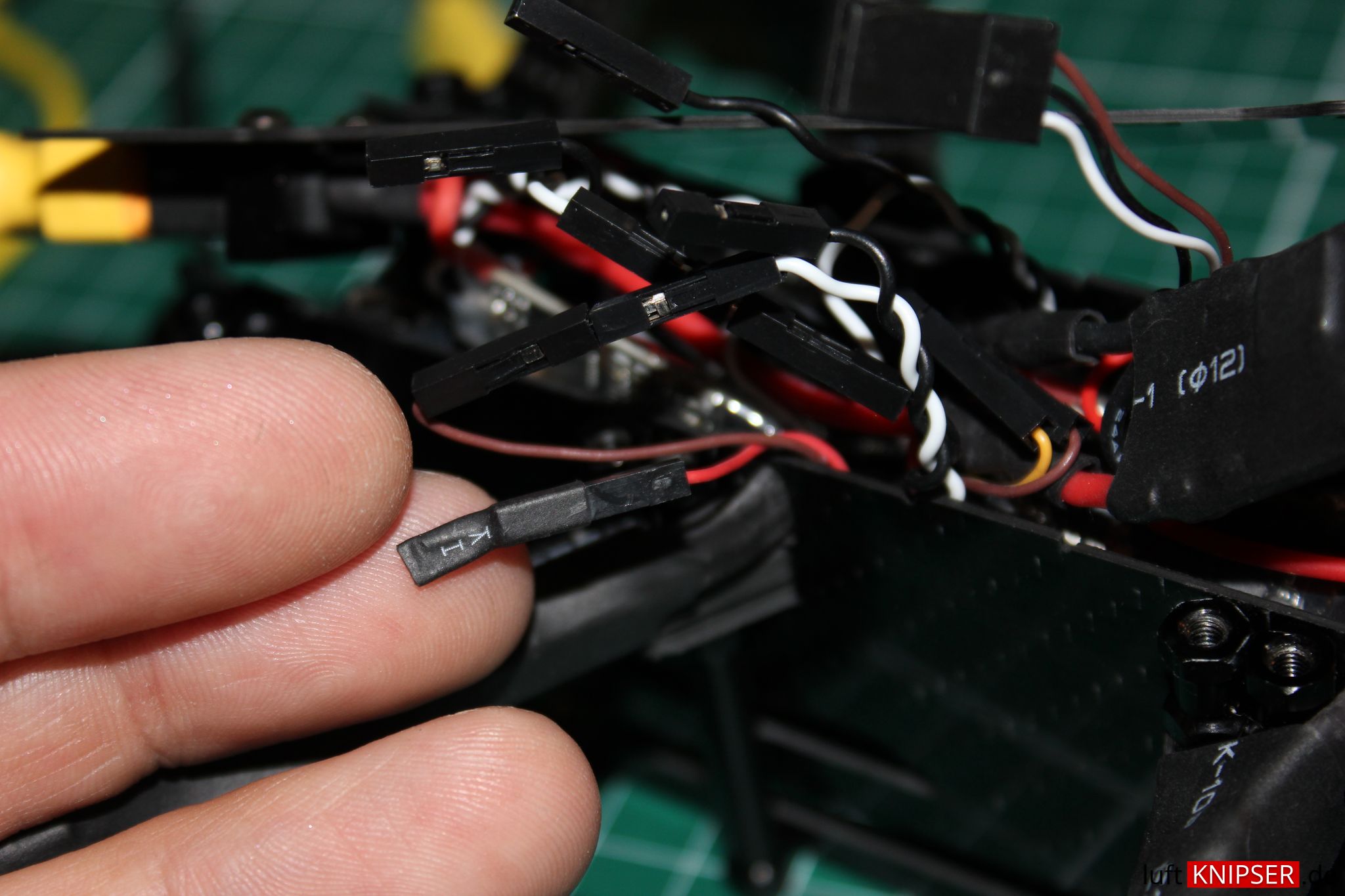
Es sind noch weitere Servo Stecker mit verschiedenen Farben vorhanden. Keiner der Stecker ist beschriftet. Ein 3poliger Stecker mit den Farben braun / rot / gelb. Ein 3poliger Stecker mit den Farben weiß / schwarz / braun und ein einzelner gelber Stecker. Das werden die Stecker für die einzelnen Kanäle und die Stromversorgung des mini Naze32 sein. Die Farbbelegung findet man heraus, wenn man die Bodenplatte des Frames entfernt und nachschaut, wo welches Kabel hinführt.
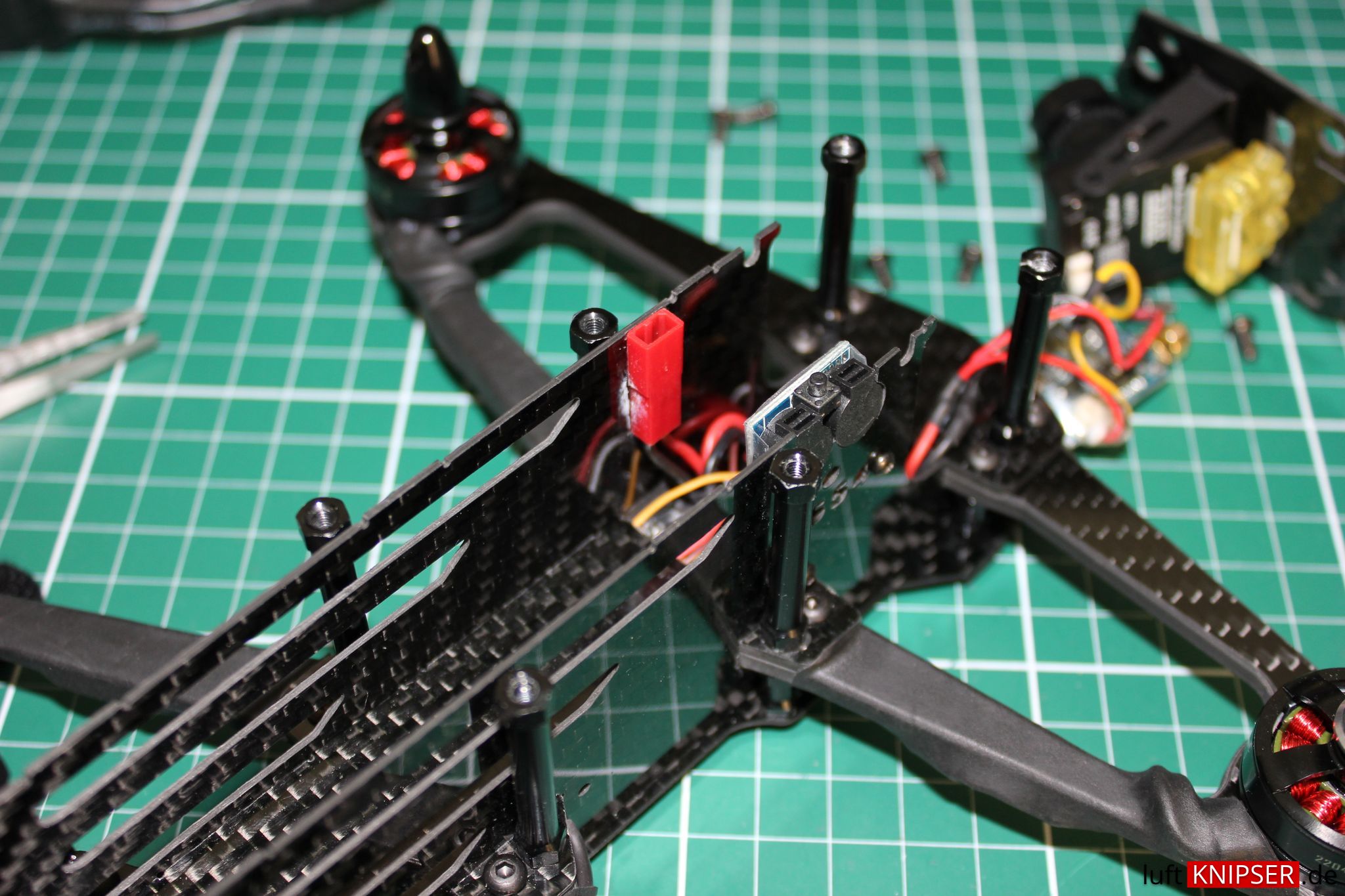
Auf der linken Seite des Frames ist eine JST Kupplung angebracht. Diese führt nach außen auf die Top-Platte des Frames. Die anliegende Spannung entspricht der Lipo-Spannung.
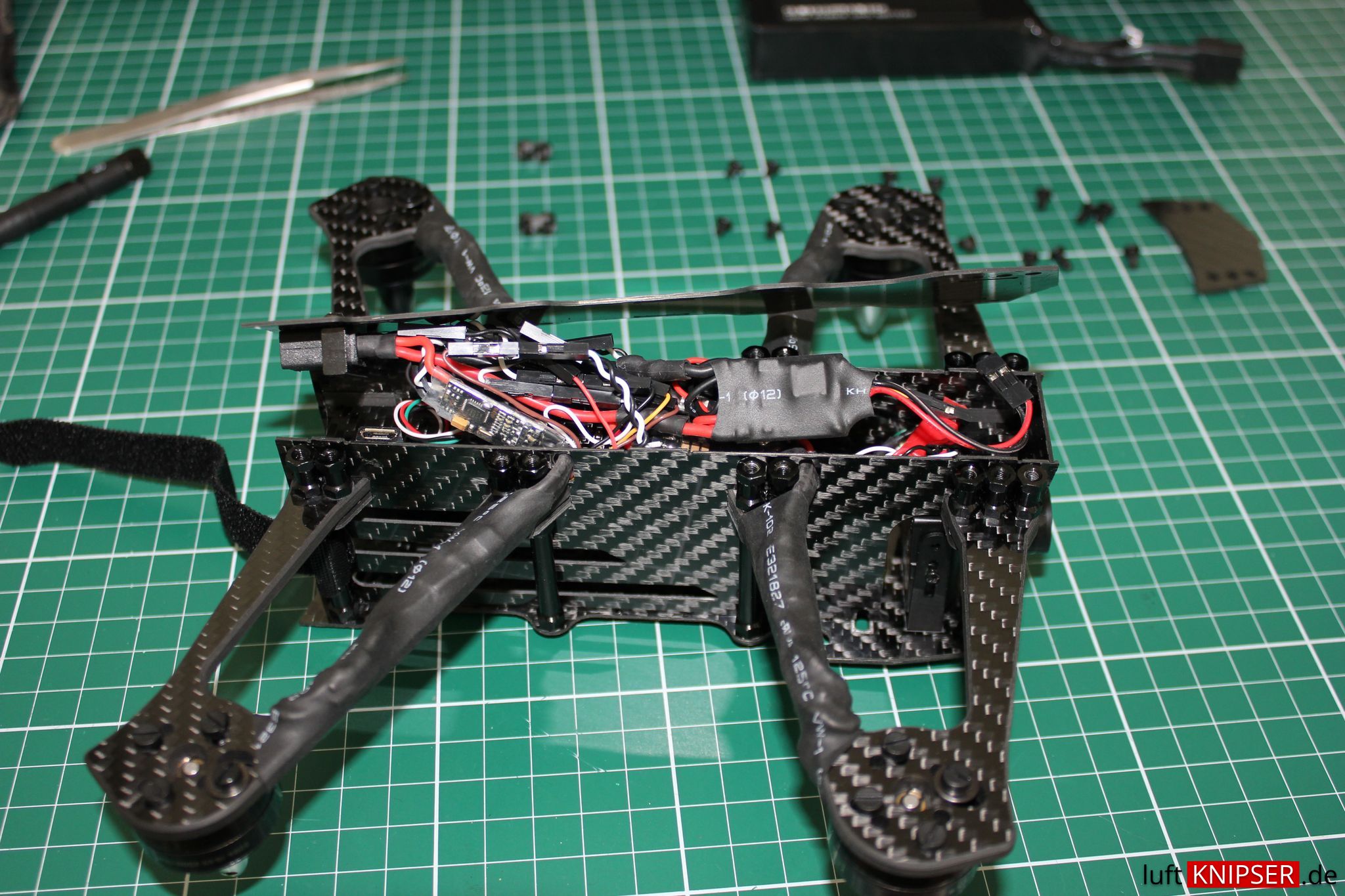
Flightcontroller, die ESCs und ein BEC
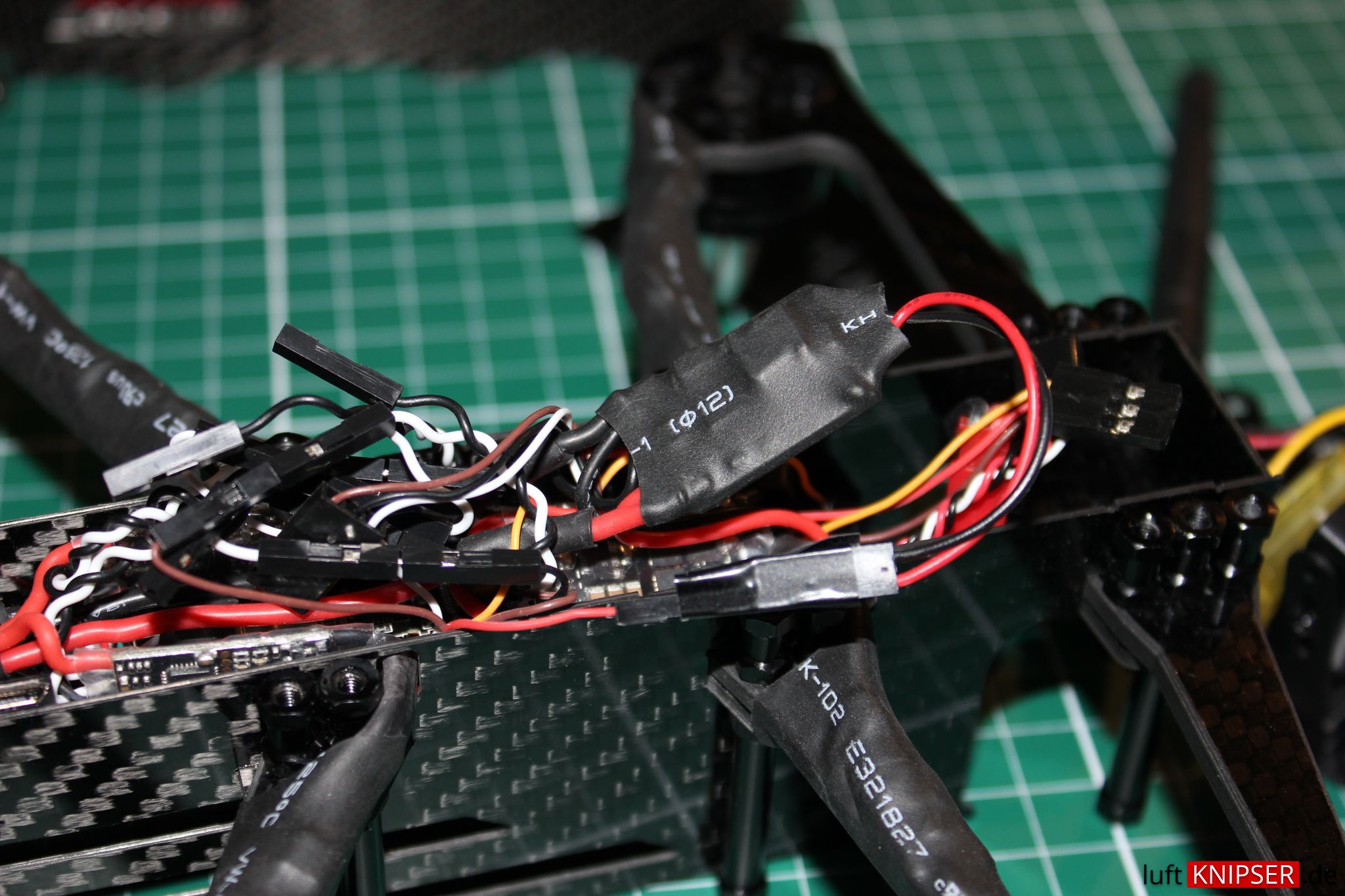
Im Unterboden des RoboterKing 210 geht es sehr eng zu. Dort sind alle vier ESC, ein BEC, der Mini Naze Flightcontroller und der LiPo Anschluss untergebracht. Man hat versucht den Kabelbaum so effizient wie möglich aufzubauen.
 Nach etwas Doktor mit der Pinzette spielen, habe ich alle Kabelverbindungen herausgefunden und konnte auch den verbauten Flightcontroller identifizieren. Es handelt sich dabei um den EMAX Mini Skyline Naze32. Dieser unterstützt als Empfänger PWM und CPPM. Somit kann ich meinen FrSky XSR Empfänger per CPPM anschließen. Als ESC scheinen FVT Litte Bee 4S 20A Regler verbaut zu sein. Die Kabel- und Anschlußbelegungen des RoboterKing ist wie folgt:
Nach etwas Doktor mit der Pinzette spielen, habe ich alle Kabelverbindungen herausgefunden und konnte auch den verbauten Flightcontroller identifizieren. Es handelt sich dabei um den EMAX Mini Skyline Naze32. Dieser unterstützt als Empfänger PWM und CPPM. Somit kann ich meinen FrSky XSR Empfänger per CPPM anschließen. Als ESC scheinen FVT Litte Bee 4S 20A Regler verbaut zu sein. Die Kabel- und Anschlußbelegungen des RoboterKing ist wie folgt:
Empfänger Anschluss-Leiste Mini Naze32
- braun = 5V GND
- rot = 5V +
- gelb = Kanal 1 (CH1)
- weiß = Kanal 2 (CH2)
- schwarz = Kanal 3 (CH3)
- braun = Kanal 4 (CH4)
- gelb = Kanal 5 (CH5; Flightmode)
ESC/Motor Anschluss-Leiste Mini Naze32
- braun = Minus ESC Motor 1 (GND)
- rot = nicht angeschlossen (5V+)
- gelb = Signal ESC Motor 1 (PWM1)
- weiß = Signal ESC Motor 2 (PWM2)
- schwarz = Signal ESC Motor 3 (PWM3)
- braun = Signal ESC Motor 4 (PWM4)
Wie bereis erwähnt, ist laut Schaubild in der Bedienungsanleitung der Anschluss eines PWM Empfängers vorgesehen. Der im Unterboden verbaute BEC hat eine Ausgangsspannung von 5,02 Volt. Diesen soll man an einen freien + und – Port des PWM Empfängers anschließen. Dies bedeutet, dass die Naze32 den 5V Strom über den Empfänger bekommt. Daher ist auch das rote Kabel an der ESC/Motor Anschlussleiste nicht angeschlossen.
 Da ich den FrSky XSR Empfänger anschließen möchte, muss ich hier etwas improvisieren. Daher habe ich das bisher nicht angeschlossene rote Kabel an den 5V+ Ausgang des BEC angesteckt. So bekommt der Flightcontroller darüber den Strom und der Empfänger wird dann vom Flightcontroller mit Strom versorgt.
Da ich den FrSky XSR Empfänger anschließen möchte, muss ich hier etwas improvisieren. Daher habe ich das bisher nicht angeschlossene rote Kabel an den 5V+ Ausgang des BEC angesteckt. So bekommt der Flightcontroller darüber den Strom und der Empfänger wird dann vom Flightcontroller mit Strom versorgt.
FrSky XSR Empfänger eingebaut
Nach diesen Arbeiten habe ich den Unterboden wieder verschlossen und das Kabel des FrSky XSR Empfängers passend dem Anschlussstecker konfektioniert.
Für den CPPM / PPM Anschluss wird vom RoboterKing nur das Kabel GELB/ROT/BRAUN benötigt. Die anderen Kabel sind in dieser Konstellation nicht relevant.
Gelb = Signal
Rot = 5V +
Braun = 5V GND
Diese Kabel verbindet man mit dem FrSky XSR an folgende Kabel:
Grün = Signal (CPPM Port)
Rot = 5V +
Schwarz = 5V GND
Die Antennen des Empfängers habe ich dann durch die vorgesehenen Öffnungen an der Top-Platte nach außen geführt und dem Empfänger samt der Top-Platte dann wieder aufgesetzt.
 Im nächsten Teil der Serie werde ich an die Cleanflight Einstellungen zum RoboterKing 210 FPV gehen und den ersten Testflug machen.
Im nächsten Teil der Serie werde ich an die Cleanflight Einstellungen zum RoboterKing 210 FPV gehen und den ersten Testflug machen.
10 Antworten zu “RoboterKing 210 FPV Racer – Das Innenleben – Teil 2”
[…] RoboterKing 210 FPV Racer – Das Innenleben – Teil 2 […]
…könntest Du mir in irgendeiner Form behilflich sein: Ich habe vor mir bei den günstigen Preis den 210er zuzulegen. Da ich mit Sektrum DX8 fliege, bin ich auf den AR610 Empfänger angewiesen. Dein Review ist die absolute Referenz, was den Roboterking 210 betrifft und das Manual von Amax ist recht verwirrend in der Hinsicht. Wie genau und was muss ich wie anschliessen damit ich den Kleinen mit dem AR610 in die Luft bekomme. Oder ist im RK 210 Manual von Amax noch irgendeine Erklärung beschrieben…das Ganze sieht für mich dann doch recht wirr und kompliziert aus… 😉 Danke, solltest Du die Zeit finden mir hierbei zu helfen…
Gerne. Der Spektrum AR610 ist ein PWM Empfänger. Die Kabelbelegung sollte daher wie folgt sein:
Kabel: braun / rot / gelb = auf den Kanal 1 aufstecken (vermutlich Throttle). Gelb muss auf den Signal-Pin
Kabel: weiß / schwarz / braun = Kanal 2 / Kanal 3 / Kanal 4 (vermutlich AILE / ELEV / RUD; ggf umstecken, muss ausprobiert werden, jeweils auf den Signal-Pin)
Kabel: gelb = Kanal 5 (vermutlich GEAR ggf. auch AUX)
Ob die Kabel zu den Kanälen passen, kannst du dann in cleanflight überprüfen. Wenn nicht, einfach Kabel für Kabel in einem anderen Anschluß testen.
…ich bin günstig an 2 S603 (Storm) Empfänger ran gekommen und werde wohl diesen auch nutzen (zumal PPM unterstützt wird). Ließen sich ohne Probleme mit der DX8 bereits binden, funktionieren also, was ich mit einem Servo getestet habe. Wie schon gesagt, ich bin blutiger Anfänger (im Selbstbau) und werde wohl beim ersten Blick in den „Unterboden“ verzweifeln…kann also sehr gut sein, das noch Einige dumme Fragen hier auftauchen werden 😉 Danke schon einmal…
…kurze Frage, wenn ich das für PPM vorgesehene Kabel an den S603 anschließe, verfüge ich dann automatisch über alle 6 Kanäle und habe somit auch Zugriff auf andere Funktionen, als nur die „pure Steuerung“ und kann das ganze mit Cleanflight einstellen ?
Das ist richtig, über das PPM Protokoll werden mehrere Kanäle über ein Kabel übertragen. Somit kannst du bis zu 8 Kanäle nutzen. In Cleanflight oder Betaflight kannst du dann neben den normalen Kanälen für die Steuereingaben auch das „scharf schalten“ (ARM) oder die Flugmodes auf einen Schalter legen.
Hi,
habe heute auch den gleichen XSR Empfänger bekommen und mich riesieg gefreut die Drone zu fliegen.
beim einbauen ist mir aufgefallen das ich kein Rotes Kabel vom Naze habe es sind nur die Motoranschlüsse da ?
nichts Rot 🙁 was muss ich tun ?
habe den XSR direkt über den BEC angeschlossen und dann den grünen am Gelben Stecker angeklemmt alles so weit gut nur der Naze bekommt kein Strom ?
kann ich den gelben Motorkabel als Roten Kabel benutzen ?
lg Claudio
Nein Claudio, einfach das „gelbe“ Kabel anstelle des roten benutzt sollte man nicht machen. Schau bitte noch mal genau nach. Manchmal kann es vorkommen, da die Farben leicht abweichen. Rot könnte auch orange sein. Gehe noch mal den ESC-Motor Kabelbaum durch. Ein Kabel dürfte nicht angeschlossen sein. Genau dieses Kabel ist dann mit 5V zu versorgen.
[…] RoboterKing 210 FPV Racer Reihe werde ich die Carbon Unterseite des Racer abschrauben und mir das technische Innenleben des Racers […]
hello I recently purchased this model kit to customize the electronic’m going to build everything from 0, however, is not clear where is located the flight controll was looking for with the help of your post full of important information about the FC position, however, between the various photos do not you see you can help in any way?